紧耦合与松耦合
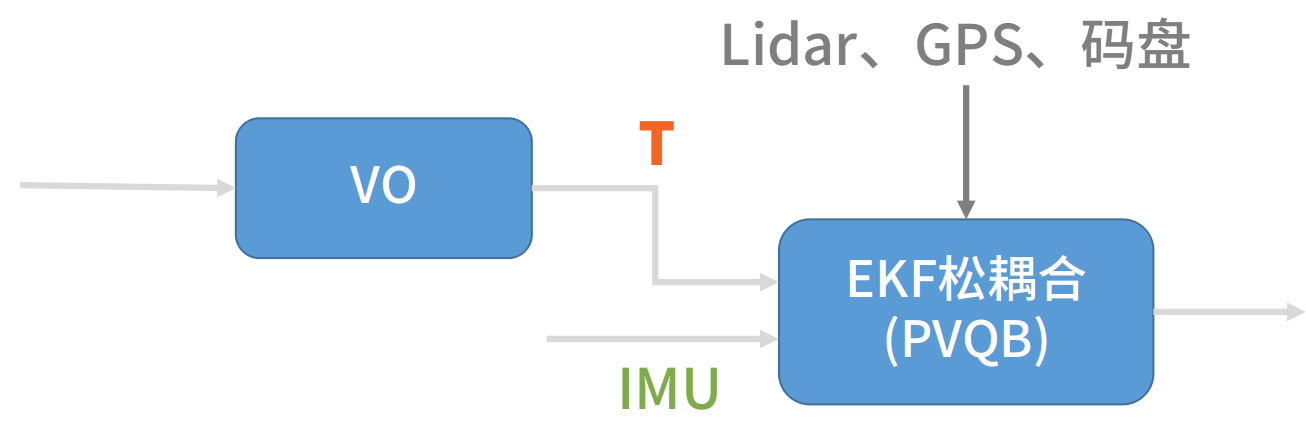
松耦合:将视觉约束 加入联合优化
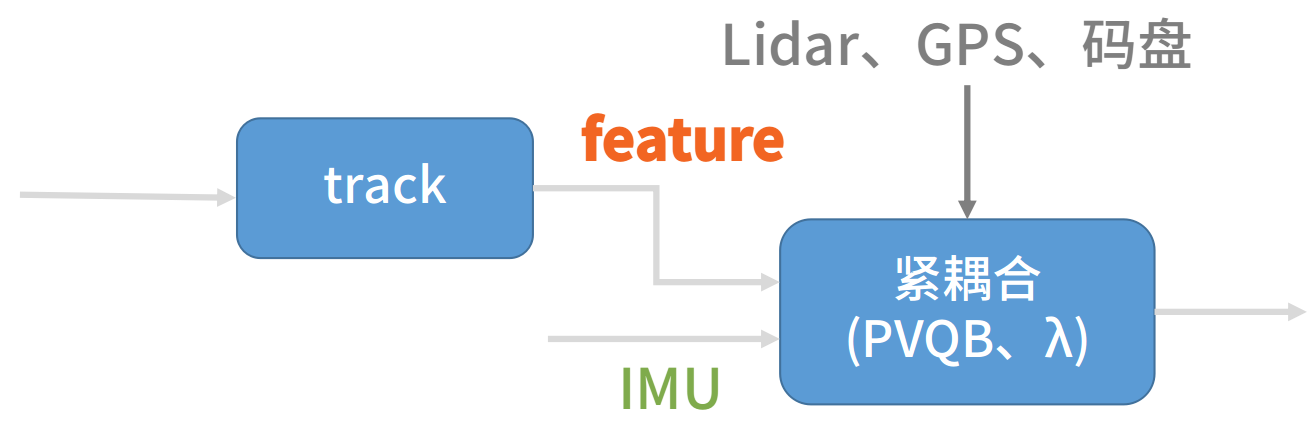
紧耦合:将视觉约束得到的位姿加入联合优化
如图所示:
优化与滤波
- 滤波相当于单次优化,区别是滤波仅考虑上一帧的影响,而优化则考虑所有帧的影响;
- 滤波比单次优化的精度高,因滤波是通过协方差来计算增量,而优化是GN、LM来计算;
- 多次优化精度比滤波高,但效率低于滤波,因优化可以迭代多次,不断优化线性化点,使误差最小。
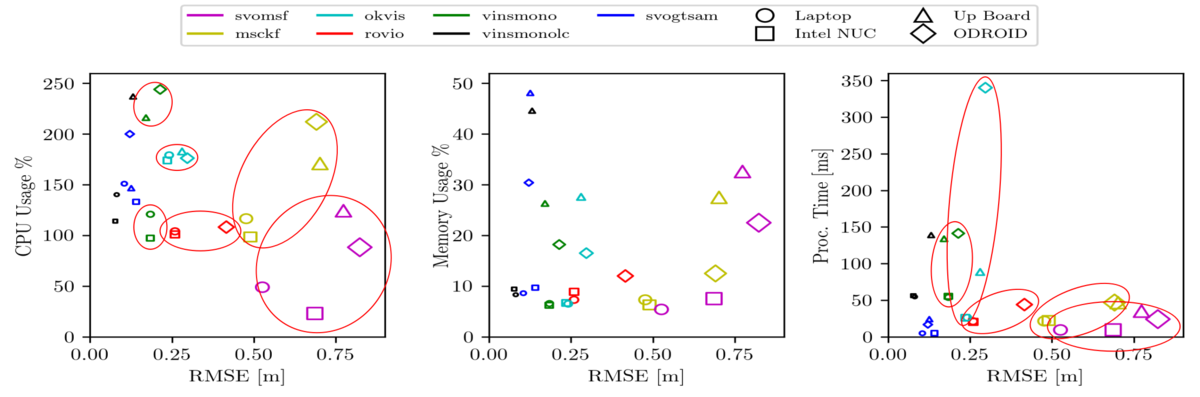
主流VIO的对比
| VIO框架 | 耦合方案 | 后端方案 | 前端 | 视觉误差 | 初始化 | 回环 | 精度 | 效率 |
|---|---|---|---|---|---|---|---|---|
| MSF | 松耦合 | 滤波EKF | \ | \ | \ | \ | 最差1 | 最快5 |
| MSCKF | 紧耦合 | 滤波EKF | fast+光流 | 重投影 | 静止 | 无 | 较差2 | 较快4 |
| ROVIO | 紧耦合 | 滤波IEKF | fast+光度 | 光度 | 静止 | 无 | 一般3 | 较快4 |
| OKVIS | 紧耦合 | 优化 | fast+brisk | 重投影 | 静止 | 无 | 较好4 | 最慢1 |
| VINS | 紧耦合 | 优化 | fast+光流 | 重投影 | 动态 | 有 | 最好5 | 较慢2 |
| VI-ORB | 紧耦合 | 优化 | orb | 重投影 | 动态 | 有 | \ | \ |
| ICE-BA | 紧耦合 | 优化 | fast+光流 | 重投影 | 静止 | 无 | \ | \ |
参考文献
崔华坤. 主流VIO技术综述 https://github.com/StevenCui/VIO-Doc
J. Delmerico. A Benchmark Comparison of Monocular Visual-Inertial Odometry Algorithms for Flying Robots. 2018. ICRA